I initially started this project as humanoid. Then I realized that motors I was using were wrong and the design had to be changed dramatically. At that point I decided that first version should be simple and went with 4-legged design. I’m planning to return to humanoid later.
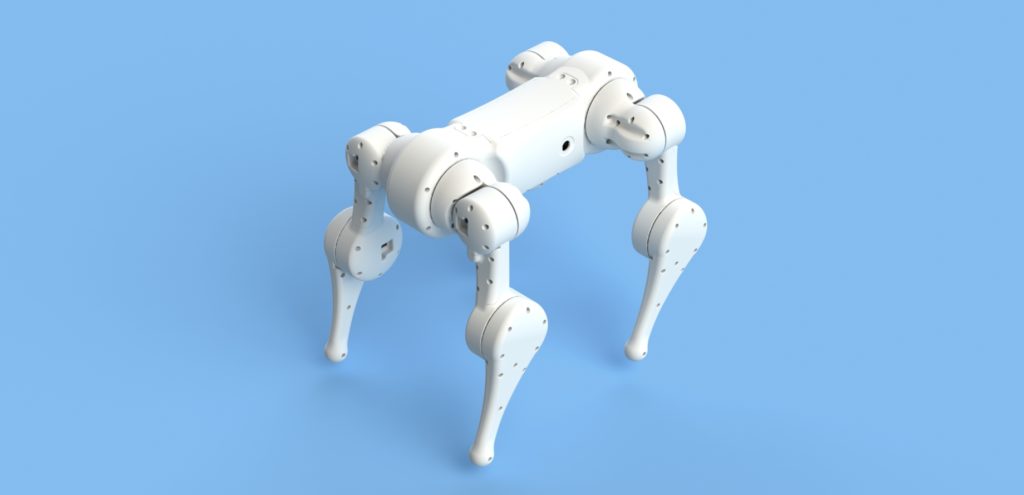
This is what it will look like. All parts will be 3D printed, it will have 12 DizzyMotor’s and a central controller board.
Hip joints and knee joints will have 360 degrees freedom which will allow some interesting styles of walking.
Right now I have only started printing parts. Updates are coming soon!