DizzyMotor is designed for robotics application with the following requirements in mind:
High torque
Optimized for stall or near stall operation
Smooth and quiet
Backdrivable
Serial interface for commands and data exchange
The following video should give you an idea what it looks like:
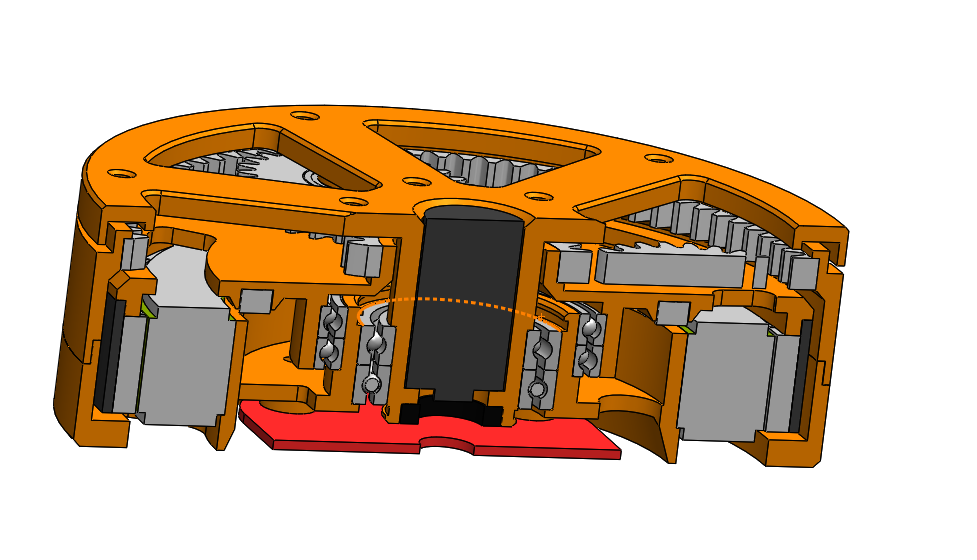
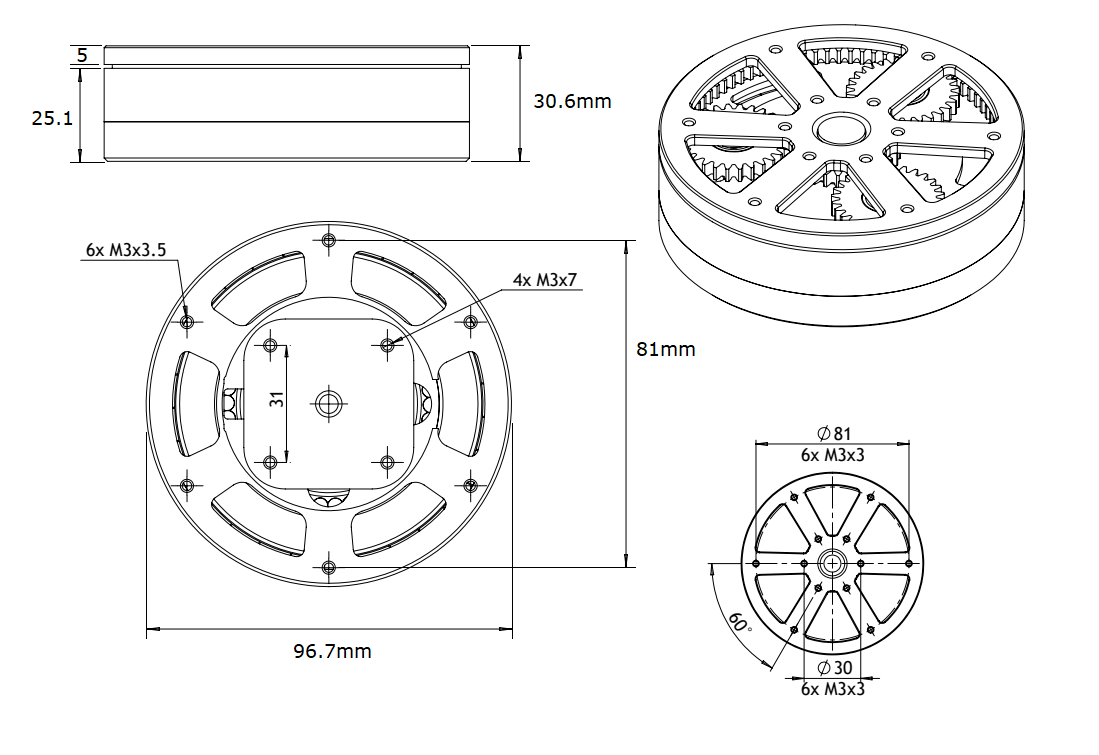
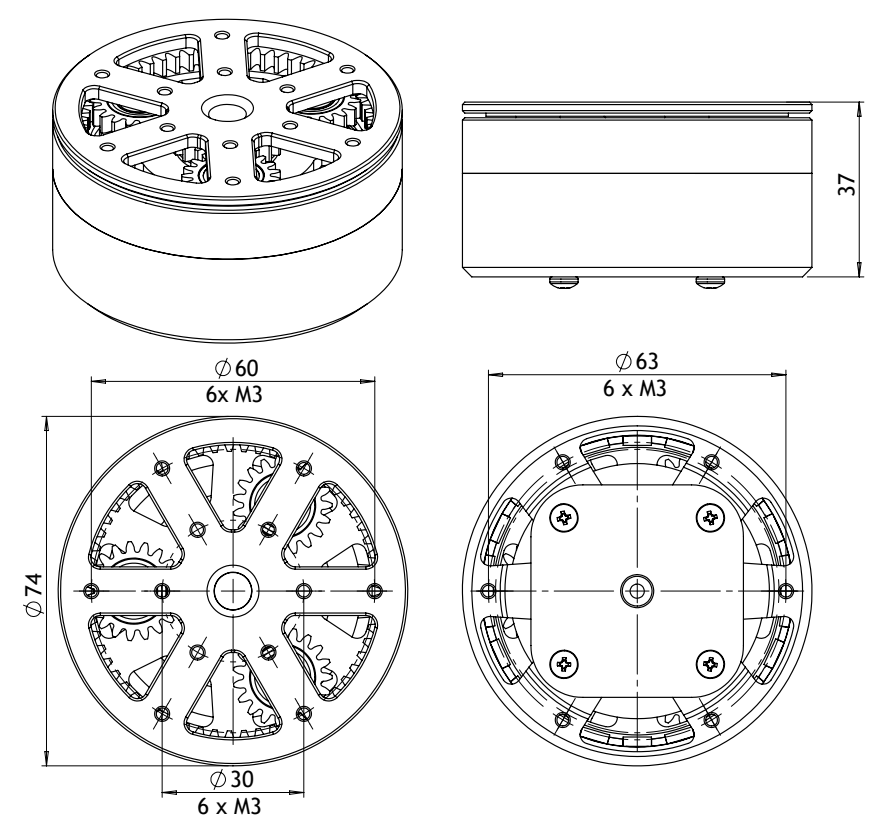
Precise CAD design allowed to fit a lot of components into minimal size. For mobile robot you want to achieve max torque/power in minimal space/weight and I’m pretty happy with how a relatively complex design came out so compact.
CNC machining is awesome. Instead of choosing from what was available I was able to make it the way I want it. Every piece (except for stator core) is custom designed, including gears.