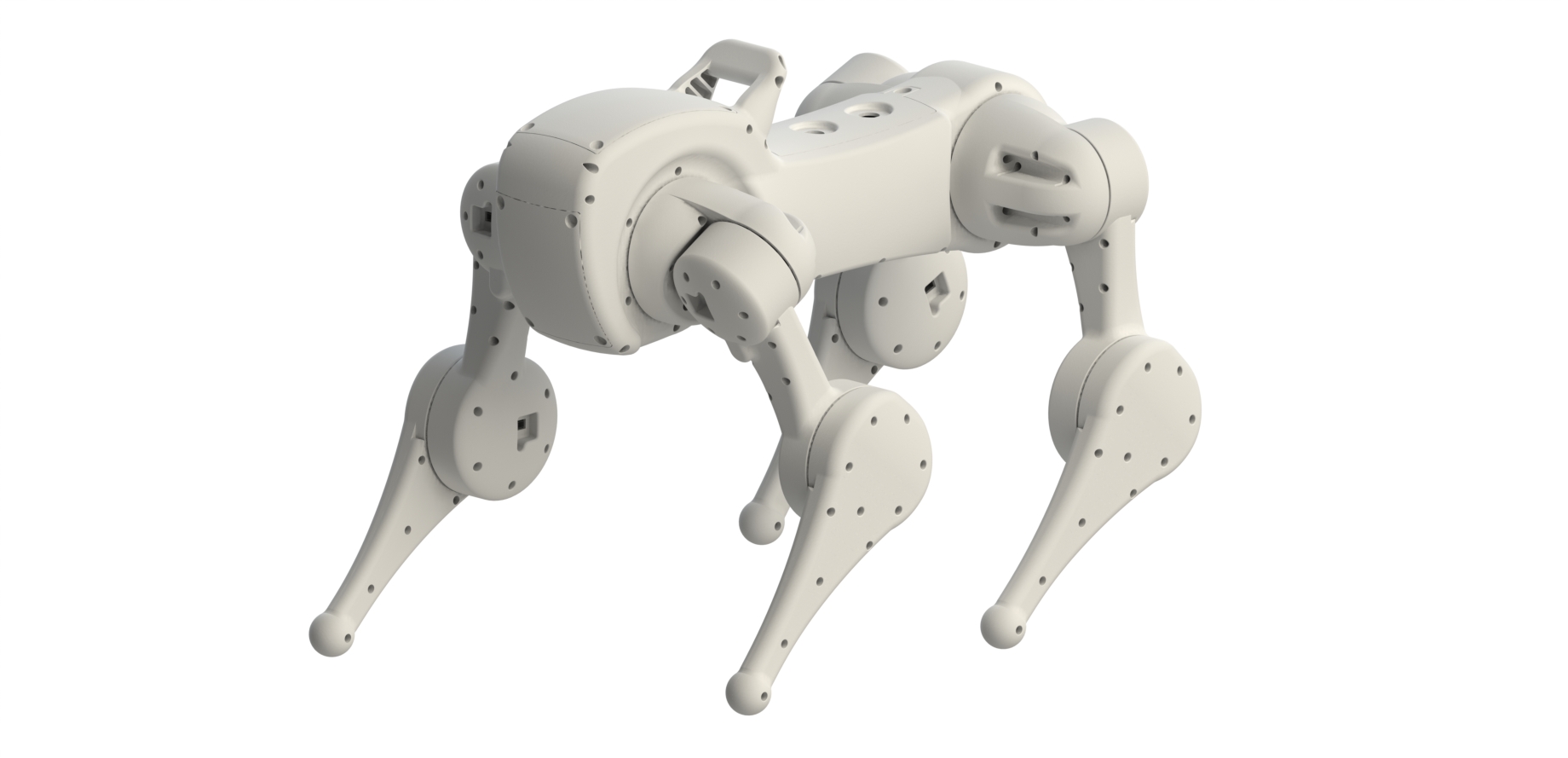
DizzyRobot is a 4-legged robot completely designed from scratch. Every aspect of it, such as plastic parts, motors, motor drivers and main controller – everything is originally designed.
3D printed
Putting bunch of motors together looks ugly unless you take care to carefully design the plastic parts, which I did. It is easy to replicate, looks “good enough” and keeps all the internals protected.
Click here for details of the overall design and 3D printing/molding:
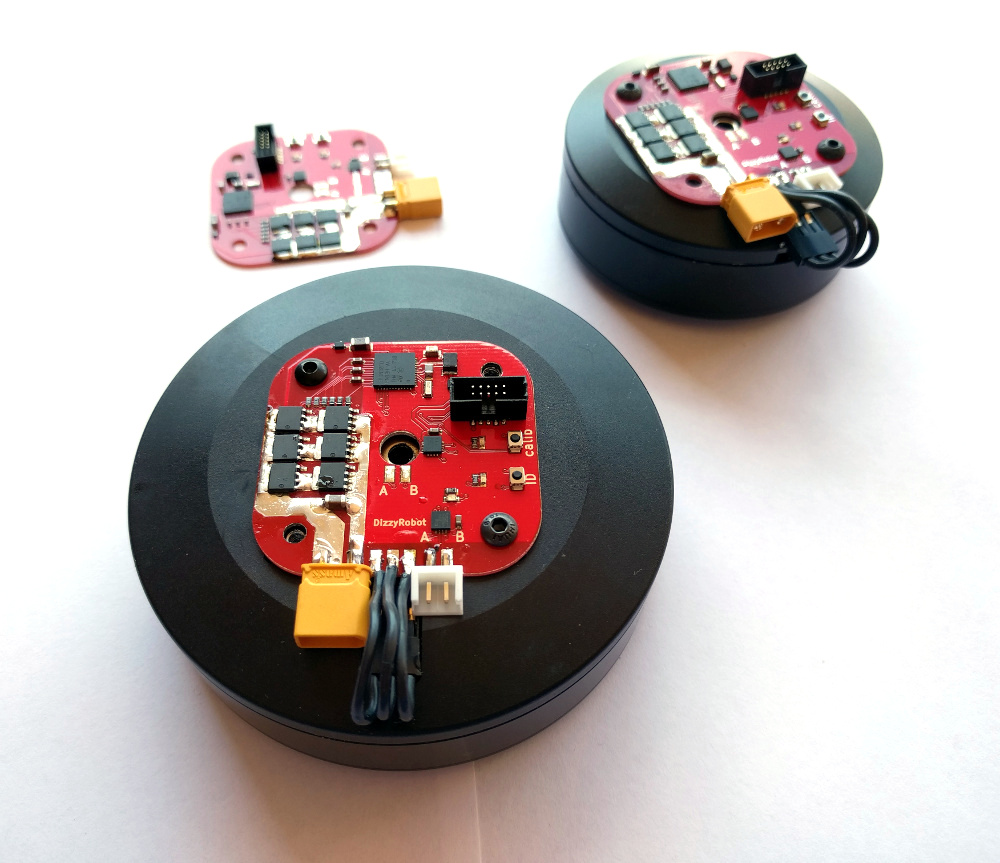
A small micro-controller board that converts BLDC into servo. It receives commands and reports back it angular position via RS485 serial interface. Multiple controllers can be connected in parallel and addressed by ID.
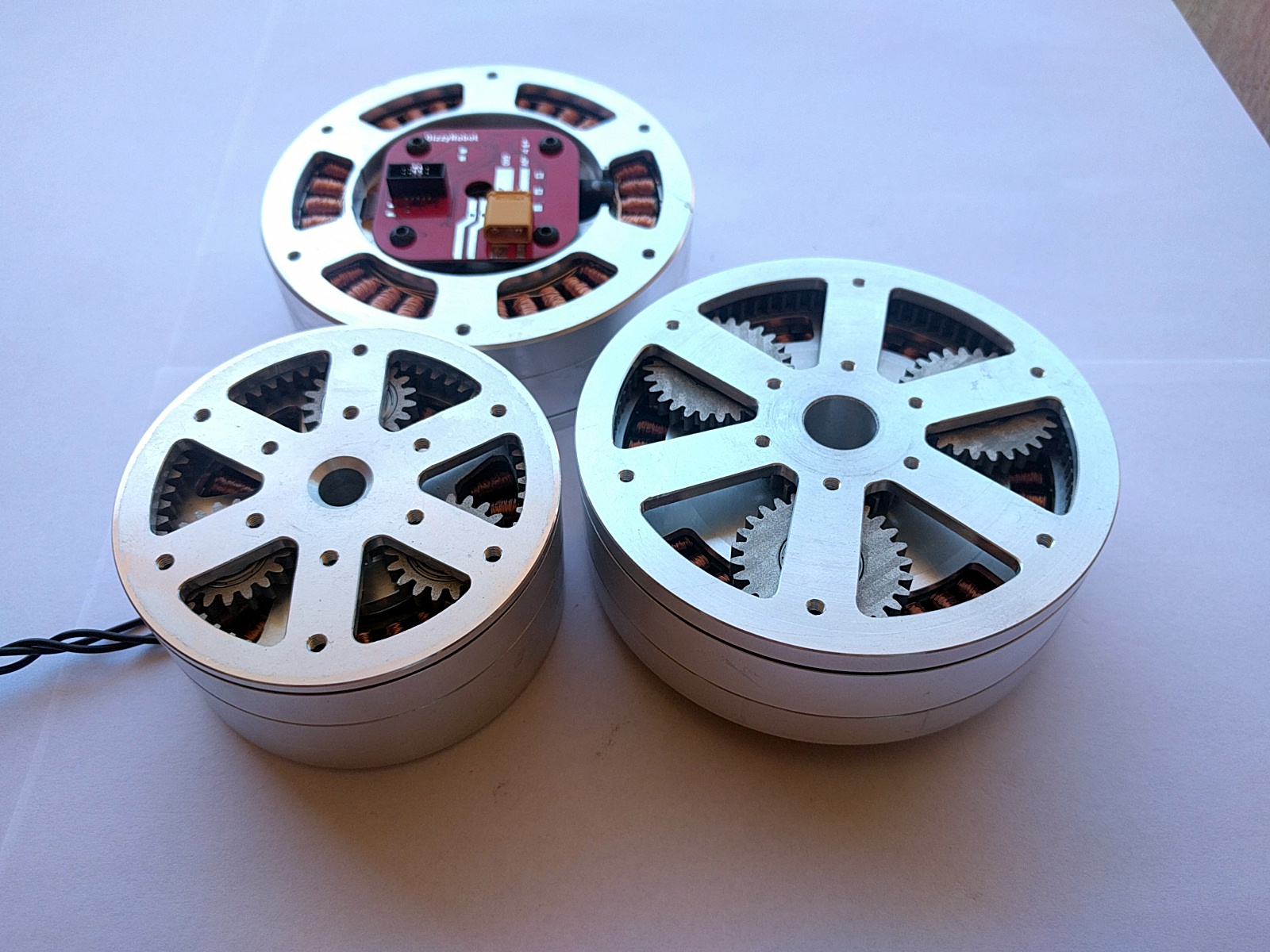
Magnetic sensor is used to read position of the rotor. Hollow shaft is convenient for robotics applications.
Open-source
Both hardware and firmware is open-source, you can easily tweak the code for your needs. Your contributions are welcome!
For hardware design details and description of protocol click here:
Enhanced by a planetary gearbox, several sizes of DizzyMotor is functionally similar to DirectServo, but delivers high torque and power in (relatively) compact size. RS485 serial interface, two magnetic sensors, custom-built aluminium body, lightweight and durable. Hollow shaft design. Available in 2 sizes.
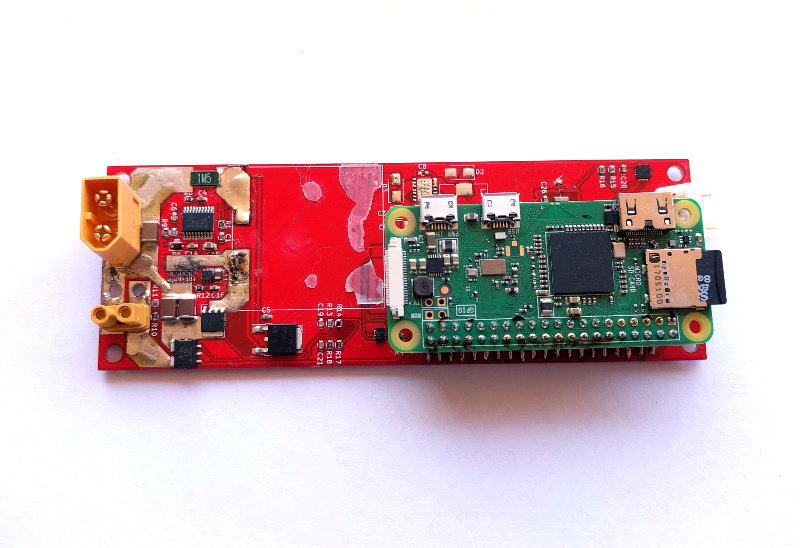
Mainboard performs several functions in one compact format: it raises battery voltage from 12-24V to 40V as required by motors; it provides 3.3V and 5V power supplies 5 Amp each; it carries gyroscope and finally int provides SPI interface which is easier that network of RS485s.
WiFi-to-RS485 bridge
Because DizzyRobot is designed to run intelligence on the PC, the mainboard uses Raspberry PI W to convert it into Wi-Fi remote. RasPi runs HTTP server which can be accessed from your PC via WiFi. Commands to the motors and readings of the sensors are exchanged via HTTP. This lets you write your AI application in your favorite language and IDE.
This will explain how to program the mainboard image, connect to network and start controlling the robot via HTTP: